
 青少年在线精英教育平台
青少年在线精英教育平台



本节课作业之前,想补充一下上个作业中忘记写的一点。
太阳齿轮的旋转方向取决于它的输出数值,如果太阳齿轮的数值大于0时,它会按顺时针旋转,相反如果数值小于0,它会按逆时针转动。它的数值等于0的时候,这它不会转动。(因为速度为零)
Step1
改变行星齿轮的个数,观察并分析。
不改变其余变量,只改变行星齿轮的个数不会对系统的转速比产生影响。因为转速比表示行星齿轮架转1圈时,太阳齿轮会转多少圈。增加或减少行星齿轮的个数只会改变系统的精确度和灵活度,不会改变太阳齿轮和齿轮架的转动的速度。
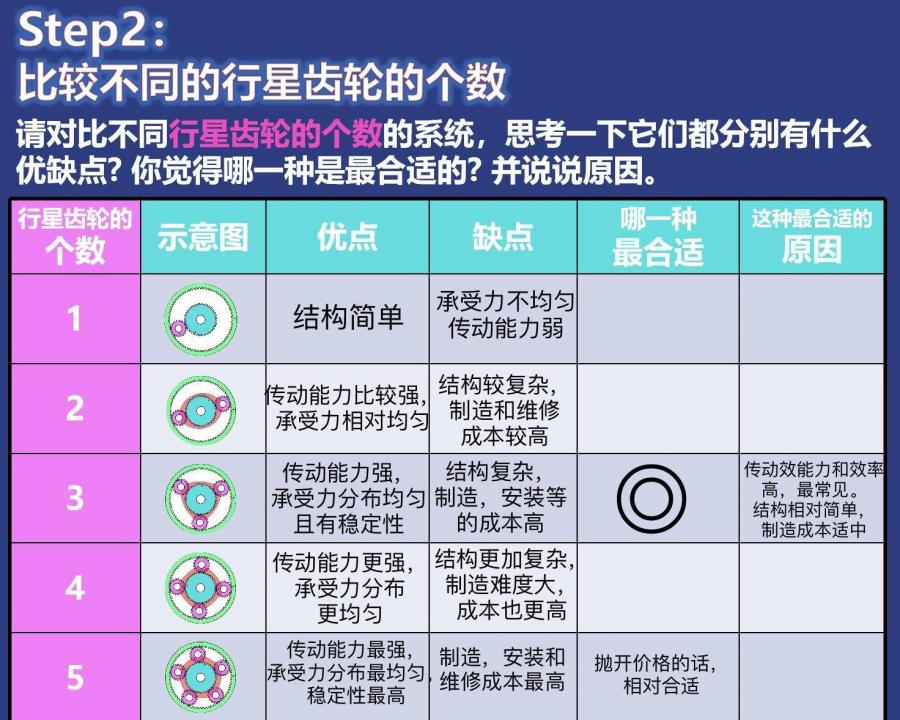
Step2
比较不同个数的行星齿轮系统的优缺点。(粘贴图片如下)
Step3
设计一个转速比为4:1的行星齿轮系统。
行星齿轮个数是3,太阳齿轮齿数和环形齿轮齿数分别是30,90。
因为有3个行星齿轮的Planetary Gear System的传动能力和传动效率较高,且承受力分布均匀。而且它是这5个里面最常见的。如果考虑成本方面,这个系统的制造,安装和维修成本适中,可以一次性大量生产,制造。它能被用于各种领域。
提高它的运动效率,只需增加太阳齿轮的速度即可。
里兰教育最新课程 ● 中国首发

- 人工智能教育专家亲自授课
- 源于斯坦福的人工智能思维
- 机器人和具身智能专业知识
- 人工智能教育专家亲自授课
- 源于斯坦福的人工智能思维
- AI对教学领域的巨大影响
WeChat & Official Accounts 微信&公众号

导师微信

里兰公众号